产品技术
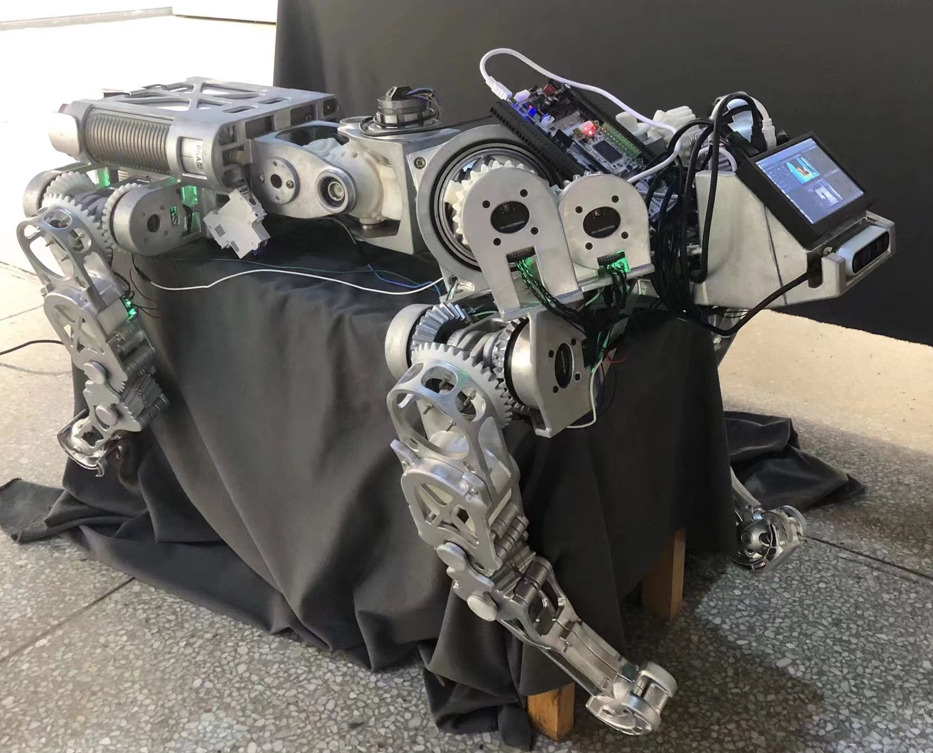
28驱仿人手-臂联合系统
28个主动自由度,可高度还原人类手臂运动关节设计
可适配常见大模型算法进行动作训练,覆盖丰富的人机协作动作
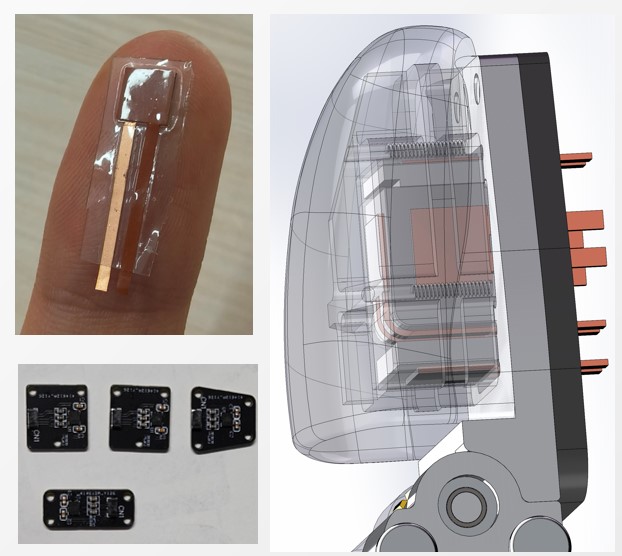
柔性指尖触觉传感器,具备毫秒级响应能力,延迟低、带宽高,可对触碰物体快速反馈

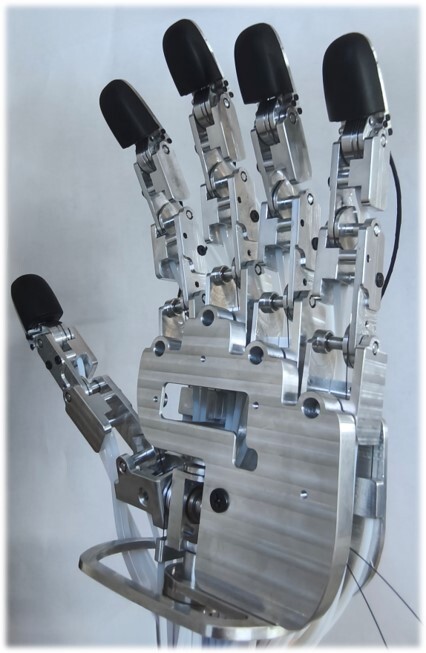
21驱钢琴演奏灵巧手
多关节远距腱绳传动系统,采用仿生腱鞘传动方案,模拟肌肉运动,传输距离长,传动效率较高
模块化关节设计,单个手指可独立更换,维护便捷,有助于降低维护成本
航空铝合金-硅胶复合材质,单手重量较轻(示例值<500g),具备较强负载能力(示例值约10kg,视工况而定)

线驱力控灵巧手
21手部主动自由度+3腕部自由度,接近人手尺寸,可较高程度还原人手运动
在同类产品中具有一定性价比,提供完善售后保障(以实际政策为准)
线驱力控灵巧手(升级版)
搭载自研双臂具身智能操作系统,采用定制底盘与融合传感方案,机器人可在家务清洁、整理、帮扶等任务中提供辅助。
集成多传感器融合(如力、3D视觉、惯性等),具备动态抓取补偿能力,提升抓取精度与稳定性,适应复杂环境。
支持基于操作任务的模型训练,硬件结构与算法可协同优化,用于丰富场景的灵巧操作与人机互动。

自研多模态传感器融合
传统的触觉传感器主要感知接触与受力大小。应用于灵巧手抓取各类不规则物体时,若缺乏受力方向信息,抓取时较难根据实际情况实时调整抓握姿态。
自研的多传感器融合方案(如2.5D触觉、激光雷达阵列、IMU位姿等)与信号采集/反馈电路,可识别抓取时的受力方向,并结合反馈算法进行姿态调整,提升抓取稳定性与灵活性。
信号采集反馈电路具有较高动态响应与较低延时,有助于在抓取过程中快速调整机器人姿态。
含脊椎运动系统的四足机器人
采用仿生脊椎结构设计,四足机器人具备较高的运动灵活性和稳定性,适用于复杂地形和动态环境。
支持多种运动模式(如快速奔跑、跳跃、爬坡等),并通过动态平衡算法提升运动过程中的稳定性。
高能量密度电池组,在典型场景下可实现较长续航(示例值约8小时,视工况而定)。